Swin Transformer理论解读+实践测试
作者:快盘下载 人气:前言
Swin Transformer是2021年微软研究院发表在ICCV上的一篇文章,问世时在图像分类、目标检测、语义分割多个领域都屠榜。
根据论文摘要所述,Swin Transformer在图像分类数据集ImageNet-1K上取得了87.3%的准确率,在目标检测数据集COCO上取得了58.7%的box AP和51.1%的mask AP,在语义分割数据集ADE20K上去的了53.5%的mIoU。
论文名称:Swin Transformer: Hierarchical Vision Transformer using Shifted Windows 原论文地址: https://arxiv.org/abs/2103.14030 开源代码地址:https://github.com/microsoft/Swin-Transformer
思想概述
Swin Transformer的思想比较容易理解,如下图所示,ViT(Vision Transformer)的思想是将图片分成16x16大小的patch,每个patch进行注意力机制的计算。而Swin Transformer并不是将所有的图片分成16x16大小的patch,有16x16的,有8x8的,有4x4的。每一个patch作为一个单独的窗口,每一个窗口不再和其它窗口直接计算注意力,而是在自己内部计算注意力,这样就大幅减小了计算量。
为了弥补不同窗口之间的信息传递,Swin Transformer又提出了移动窗口(Shifted Window)的概念(Swin),后续详细进行分析。

分块详解
整体架构
Swin Transformer有多种变体,论文中给出的这幅图是Swin-T的模型架构图。
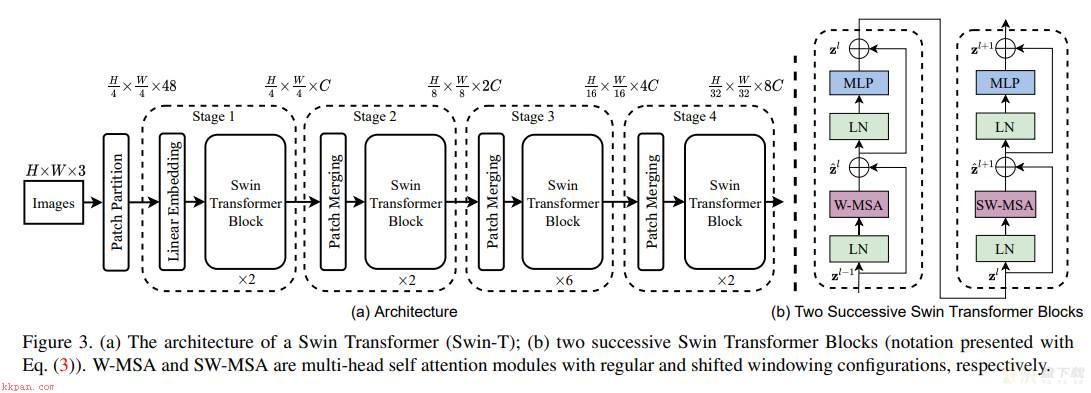
下面就按照图片输入到输出的顺序,对各模块进行分析。
Patch Partion
输入图片尺寸为HxWx3,Patch Partion作用就是将图片进行分块。对于每一个Patch,尺寸设定为4x4。然后将所有的Patch在第三维度(颜色通道)上进行叠加,那么经过Patch Partion之后,图片的维度就变成了[H/4,W/4,4x4x3]=[H/4,W/4,48]
Linear Embeding
Linear Embeding作用是对通道数进行线性变换,经过Linear Embeding之后,图片维度从[H/4, W/4, 48]变成了 [H/4, W/4, C]。
Swin Transformer Block
Swin Transformer Block是Swin Transformer的核心部分,首先明确Swin Transformer Block的输入输出图片维度是不发生变化的。图中的x2表示,Swin Transformer Block有两个结构,在右侧小图中,这两个结构仅有W-MSA和SW-MSA的差别,这两个结构是成对使用的,即先经过左边的带有W-MSA的结构再经过右边带有SW-MSA的结构。
W-MSA
W-MSA模块就是将特征图划分到一个个窗口(Windows)中,在每个窗口内分别使用多头注意力模块。 论文在这里还强调了一下W-MSA和MSA计算量的对比,计算公式如下:

MSA就是之前ViT不加窗口计算全局注意力。下面就来看看这两个式子是如何计算得到的。 先看MSA:在Transformer中,注意力的计算公式如下所示:


SW-MSA
第一个Swin Transformer Block的MLP结构和之前ViT一样,没有新东西,下面就到第二个Swin Transformer Block中的SW-MSA模块。
SW-MSA主要是为了让窗口与窗口之间可以发生信息传输。 论文中给出了这样一幅图来描述SW-MSA。

值得注意的是,表面上看从4个窗口变成了9个窗口,实际上是整个窗口网格从左上角分别向右侧和下方各偏移了M/2个像素。但是这样又产生了一个新的问题,那就是每个窗口大小不一样,不利于计算。
于是作者又想到了一个“天才级”的想法,即将左上角的窗口移动到右下角进行合并。

这样就可以计算在新生成的四个窗口中计算内部注意力,但是仍然存在的一个问题是原本的不同模块是从上面移下来的,不应该和原本的下方模块计算注意力,比如天空和大地计算注意力会出问题。于是作者又添加了一个掩码矩阵。对于每一个窗口分别设计一个掩码矩阵,其中对于不应该被计算的部分,掩码矩阵就赋值为-100,这样后续通过Softmax计算之后,最终就变成0,相当于起到过滤作用。
Patch Merging
第一个Stage结束之后,后面3个Stage的结构完全一样。和第一个Stage不同的是,后面几个Stage均多了一个Patch Merging的操作。 Patch Merging的操作不难理解,首先是将一个矩阵按间隔提取出四个小矩阵,然后将这四个矩阵在第三通道上进行Concat,在进行LayerNorm之后,通过一个线性层映射成2个通道。这样,通过Patch Merging操作之后的特征图长宽分别减半,通道数翻倍。
下图比较清晰地展示了 Patch Merging的操作过程,图源[1]。

相对位置偏置(Relative Position Bias)
上面已经按照流程将Swin Transformer的核心内容整理清楚了,在论文的最后部分,作者还提出了一种相对位置偏置的计算方法。

使用该方法之后,可以看到结果会有小幅提升:

不过,作者没有细讲该方法的具体原理,看到这篇文章解读得不错,直接放在这里。
对比测试结果
最后,作者在不同领域,和其它算法进行了对比测试,可以看到,Swin-L基本均取得了最好效果。


不同版本
Swin Transformer根据不同的配置参数大小,主要可以分下面四个版本。

表中:
win. sz. 7x7表示使用的窗口(Windows)的大小dim表示feature map的channel深度(或者说token的向量长度)head表示多头注意力模块中head的个数实践测试
实践测试我找的是和之前ViT类似的图像分类例子,使用的花卉数据集。 代码仓库地址:https://github.com/WZMIAOMIAO/deep-learning-for-image-Processing/tree/master/pytorch_classification/swin_transformer
我用Swin-S这个模型进行训练,相比于之前的ViT,模型训练速度几乎提升了一倍,最终精度也比ViT略高一些。
代码备份
下面是我跑的代码备份,里面包括了我所下载的预训练模型。(模型大小也几乎是ViT的一半) https://pan.baidu.com/s/1B9SAXZ7AWPlwpZZ_T6gUKQ?pwd=8888
References
[1]https://blog.csdn.net/QQ_37541097/article/details/121119988 [2]https://www.bilibili.com/video/BV13L4y1475U
加载全部内容